1. intruction
问题 - 》模型 - 》 算法
1.1. 原理 ARRD
- A - approximation , 近似求解
- R - reformulation , 对问题进行重构
- R - relaxation , 对复杂约束进行处理 - 线性松弛
- D - Decomposition, 大规模问题分割子问题
2. 线性导论
所有的向量都需要使用 mathbf 加粗, 且向量均为列向量
| 类型 | 表示方法 | 展示 |
|---|---|---|
| 标量 | 普通 | $x$ |
| 向量 | 粗体小写字母,使用 \mathbf |
$\mathbf{x}$ |
| 矩阵 | 粗体大写字母,使用 mathbf |
$\mathbf{X}$ |
| 张量 | 花体字母, 使用 \mathcal |
$\mathcal{X}$ |
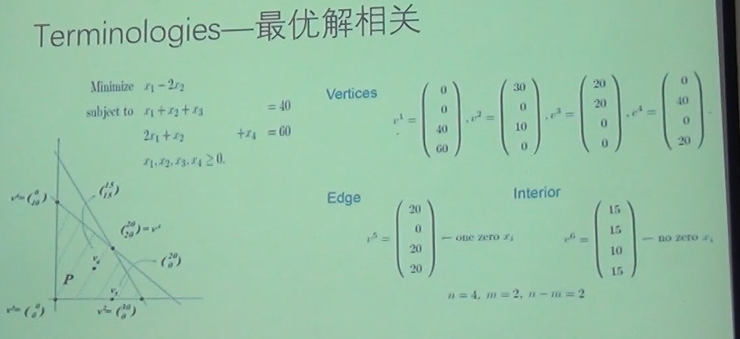
2.1. 单纯形法
性质:最优点一定在顶点 / 无穷点 上
- 从一个顶点开始
- 判断是否是最优点,stop, 否则进入 3 中
- 如何移动到相邻顶点
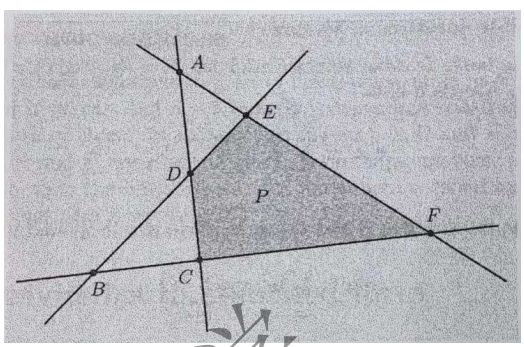
顶点是由两条边相交形成的,然后形成一个顶点,作为待解点
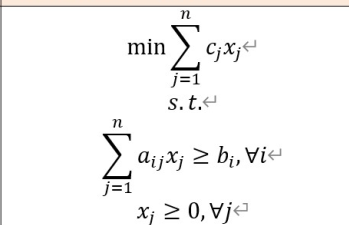
2.2. stardard form
- 最小化目标函数
- 等式约束
- 变量非负
使用乘法,按照元素方式看待模型
2.3. converting to stardard
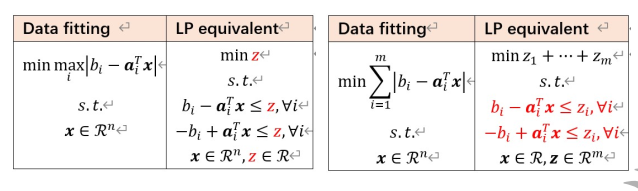
2.3.1. 目标中存在绝对值
使用 $x^+. x^-$ 来替换|x|
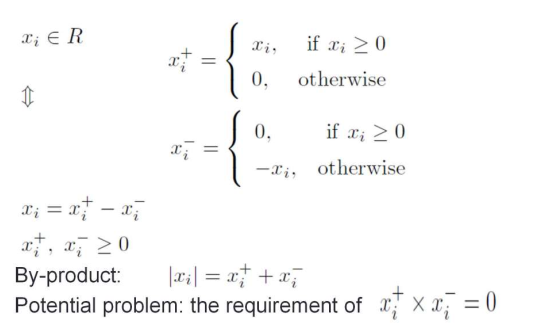
按照更换公式, $|x| , x$ 的表示方法如下:
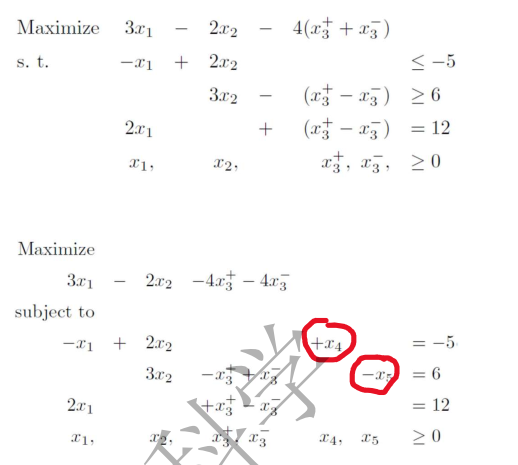
2.3.2. 不等式转换为等式
增加 松弛变量
- 小于时, 加上松弛变量
- 大于时, 减去松弛变量
2.3.3. 最大化 - > 最小化
增加 “-”
2.4. 凸函数
凸函数定义:开口向上,具有最小值
2.4.1. 性质
$f_1, f_2, \dots, f_n$ 都是凸函数 $y = max(f(x))$ 也是凸函数
一堆线性函数求最大值,是凸函数 ,
一个凸函数可以转换为多个分段线性函数
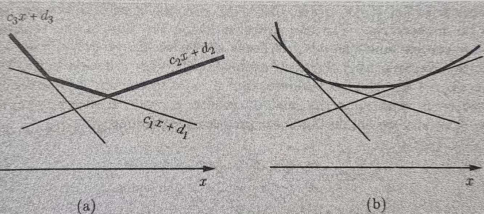
使用多个线性的 max 表示之后,可以使用引入新变量,消除 max
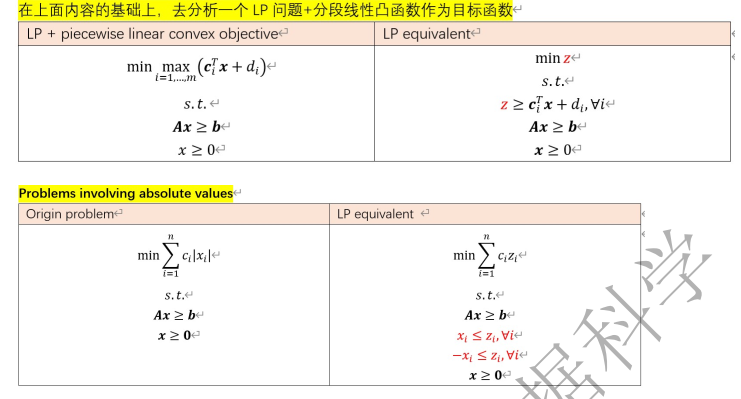
max 可以引用一个新的变量替换
|X| = max{x, -x }
2.5. linear algebra
3. 几何表示
一个等式 是 一个超平面(对应维度的子空间, 少一个维度的空间)
可以叫对应的几何空间划分为三个部分,
- 上空间
- 超平面
- 下空间
梯度方向是函数增大的方向, - 梯度方向是函数减小的方向
3.1. 多面体 polyhedron
一个多面体 = 多个半空间相交
顶点 = 极值点 = 基可行解
3.2. 代数运算
3.2.1. 求基解
紧约束: 等式 对 顶点的确定起了作用, 成为紧约束,即 在这里不等式 变为等式
顶点定义: 紧约束数量 = dim()
等式约束本身就是紧约束,需要再选出部分非等式约束,组成 n 个约束
此时,求得的顶点是基解,但是由于缺少其他约束, 因此不是可行解
- 线性约束数量 为 m , 变量数量为 n
- M < n
- 此时将
n - m个 $ x_i \geq 0$ 变为紧约束,可以求解了
求出的 x 是基解 , 即所有线段相交的节点
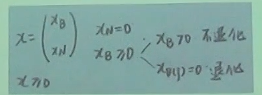
B 是基变量, N 为非基变量
3.2.2. 基解退化
3.2.2.1. 几何
其他约束在这里也是紧约束,有一个新的约束也是紧约束,是多余的紧约束, 反映在代数中有一个基解为 0 .
3.2.2.2. 代数
多个基 可能会对应一个基解
= 》 变换不同的解,但是相交的节点相同
3.2.2.3. 基解与节点坐标关系
3.3. simplex methed
| $x_B^T$ | $x_N^T$ | rhs | |
|---|---|---|---|
| $x_B$ | $B$ | $N$ | $b$ |
| $r^T$ | $0^T$ | $c_N^T - c_B^T N$ | $0^T$ |
| $x_B^T$ | $x_N^T$ | rhs | |
|---|---|---|---|
| $x_B$ | $I$ | $B^{-1} N$ | $B^{-1} b$ |
| $r^T$ | $0^T$ | $c_N^T - c_B^T B^{-1} N$ | $- c_B^T B^{-1} b$ |
$B^{-1} b$ 代表可行方向, 初始解开始可行,之后变换过程中,始终保持 rhs 为正
$c_N^T - c_B^T B^{-1} N$ 是最优方向
顶点数量为 $C_{n}^{n-m} = C_{n}^{m}$ , 数量较大,选择一种有效的方式筛选点
- 选择初始点
- 从起始点 -》 最优点
对于线性规划, 是一个凸函数问题, 局部最优点 = 全局最优
- 选择可行方向
- 选择最好的方向
- 方向上行动的距离
3.3.1. 可行方向
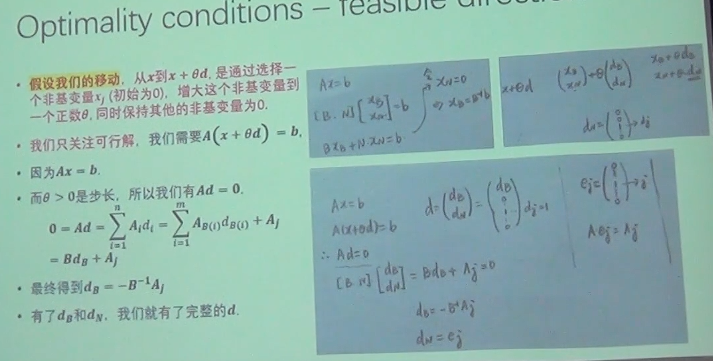
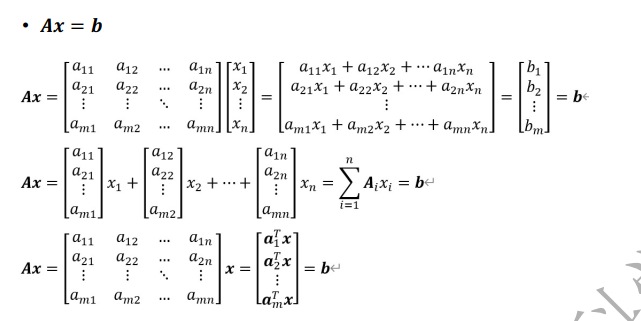
开始 $ Ax = b$
移动 x 到 下一个顶点, 为 $ x + \theta d$
依旧满足顶点公式, $A(x + \theta d) = b$, 得到 $A \theta d = 0$
其中 $ d_N$ 仅 修改 $ d_j$ , $d_B$ 作为待修改对象(人为规定,不要问为什么)
计算得到
可行方向 $[d_B, d_N]$ , 对于非退化解, 方向一定是可行,否则,不可行
3.3.2. 好的方向
原目标函数
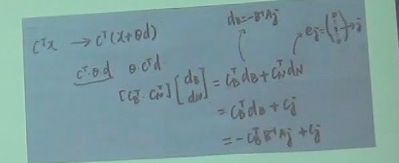
reduced_cost 需要保证 $\bar{c}_j = c_j - c_B^T B^{-1} A_J$ , 结果值 要小于 0
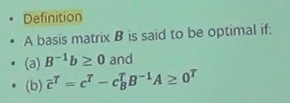
3.3.3. 最优条件
- 所有的基 向量大于 0
- 所有非基变量的 reduced cost 大于 0 ,没有可以下降的非基 时候,
3.3.4. 行动的步长
$ cost = \theta * \bar{c} $ ,所以 $\theta$ 步长值 尽可能大
最大步长受限于 $X_B + \theta d_B$, 基变量的值需要满足非负变量

3.4. LP 基本矩阵
$x_B$ 是基变量, $ x_N $ 是非基变量
其中
其中满足 $Ax = Bx_B + Nx_N = b$ , 计算得到 $ x = [x_B ; x_N] = [B^{-1}b ; 0] $
式子可以改写为 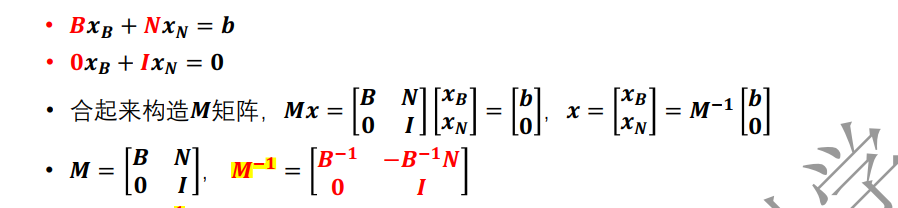
其中 M 成为基本矩阵
3.5. 两阶段 simplex method
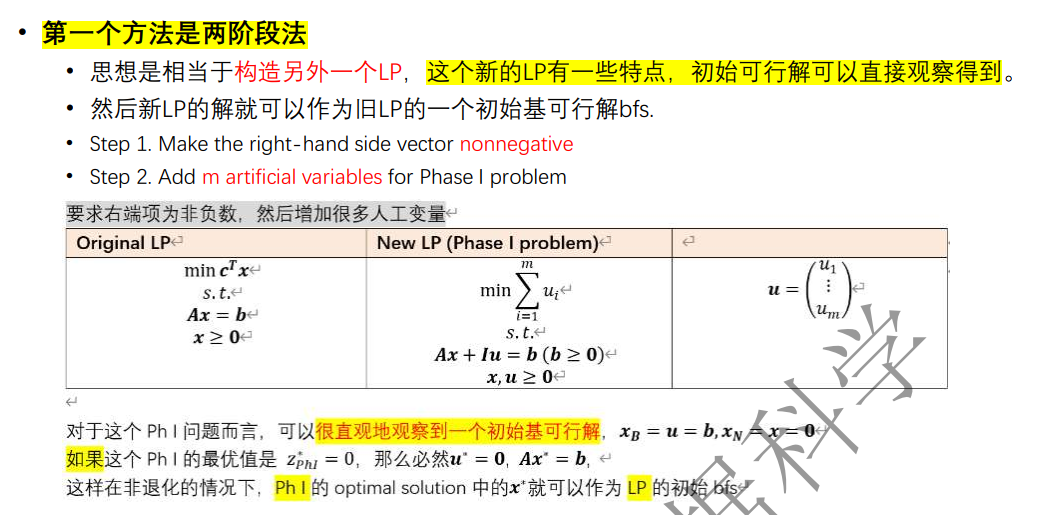
原因 : 当约束中不存在不等式约束 时, 不能增加新的变量, 构成基, 因此不容易找到初始可行解
方法: 使用两阶段单纯形法
4. 搜索算法
梯度方向 = 当前 $x$ 附近, 函数下降最快的方向
内积最大的情况下, $\Delta f(x) = \Delta x$
- max 变化值最大的 $\Delta x $ , 取值 $\Delta x = \Delta f(x)$
- min 变化值最大的 $\Delta x $ , 取值 $\Delta x = -\Delta f(x)$
4.1. 有约束的搜索方向
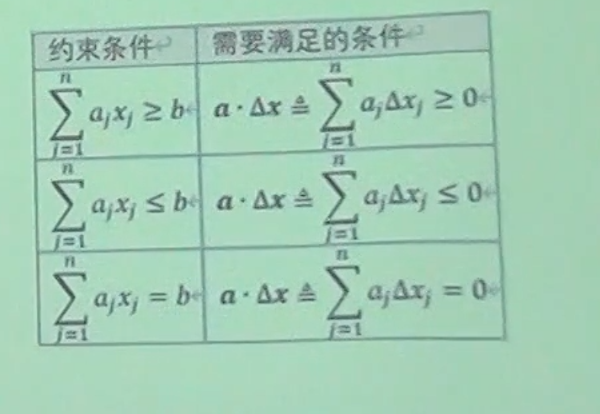
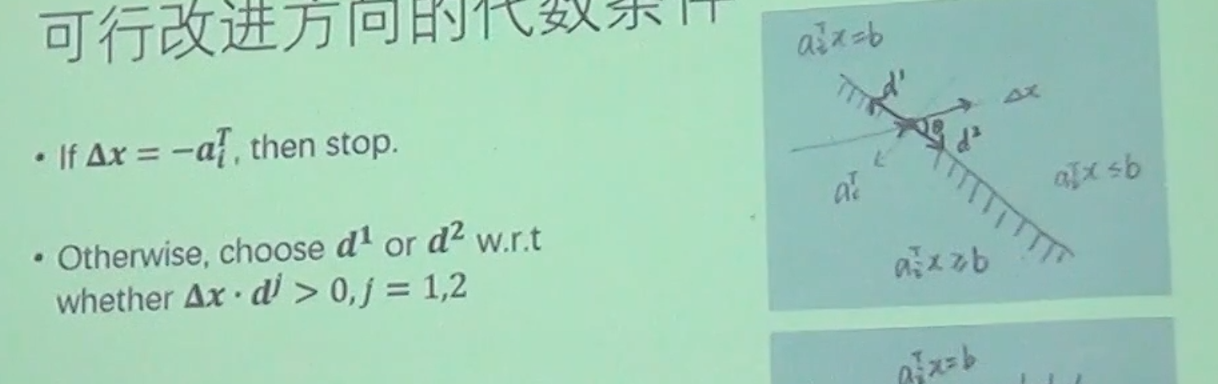
- 当 $ \Delta x = - \alpha_i^T$ 时候, 沿着可行方向的梯度无法下降,找到局部最优点,此时无法再下降
- 否则,需要保持上图 1 中的约束条件
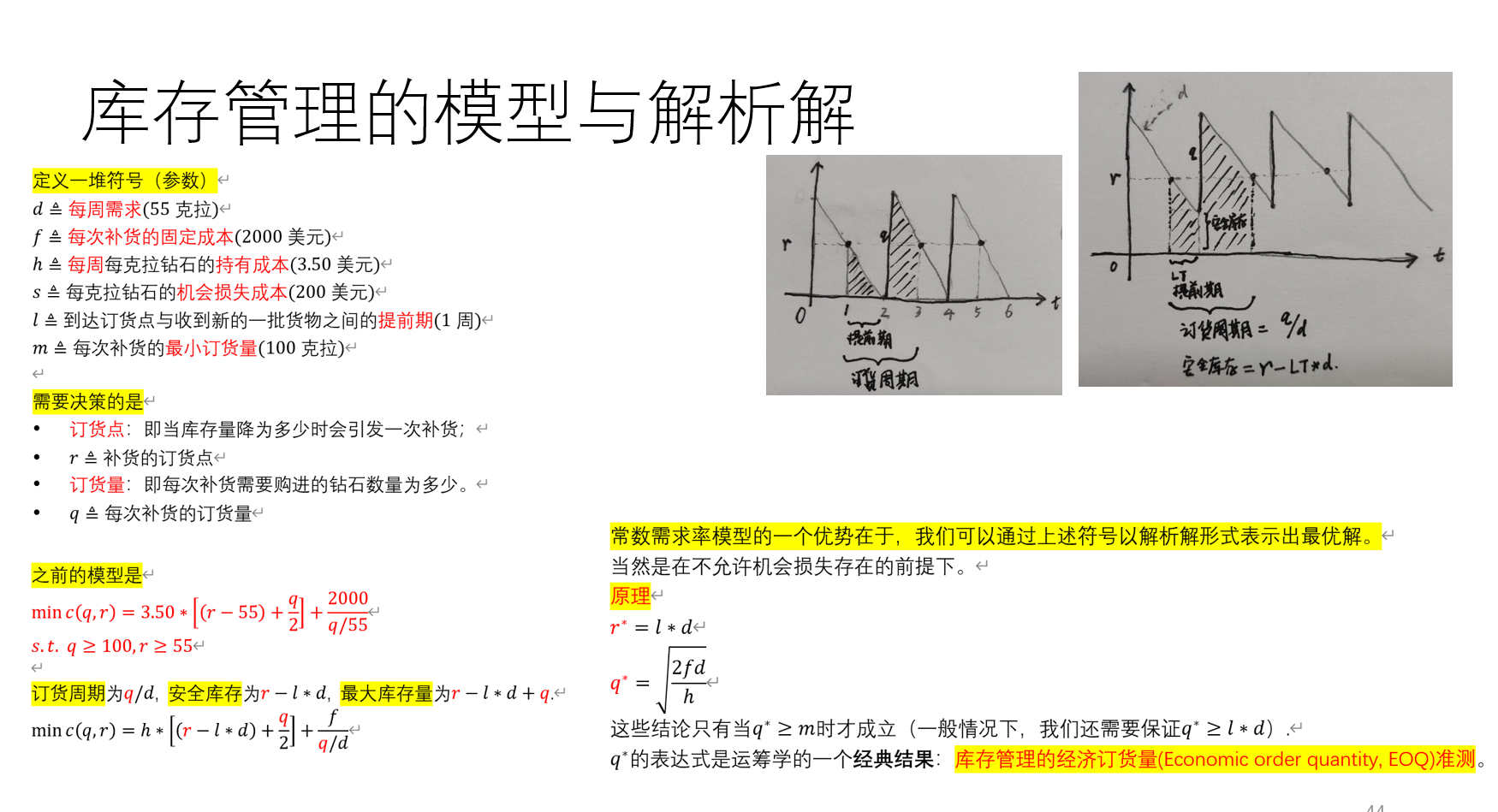
4.2. 解析解
做出一定的假设,使用解析解进行灵敏度分析
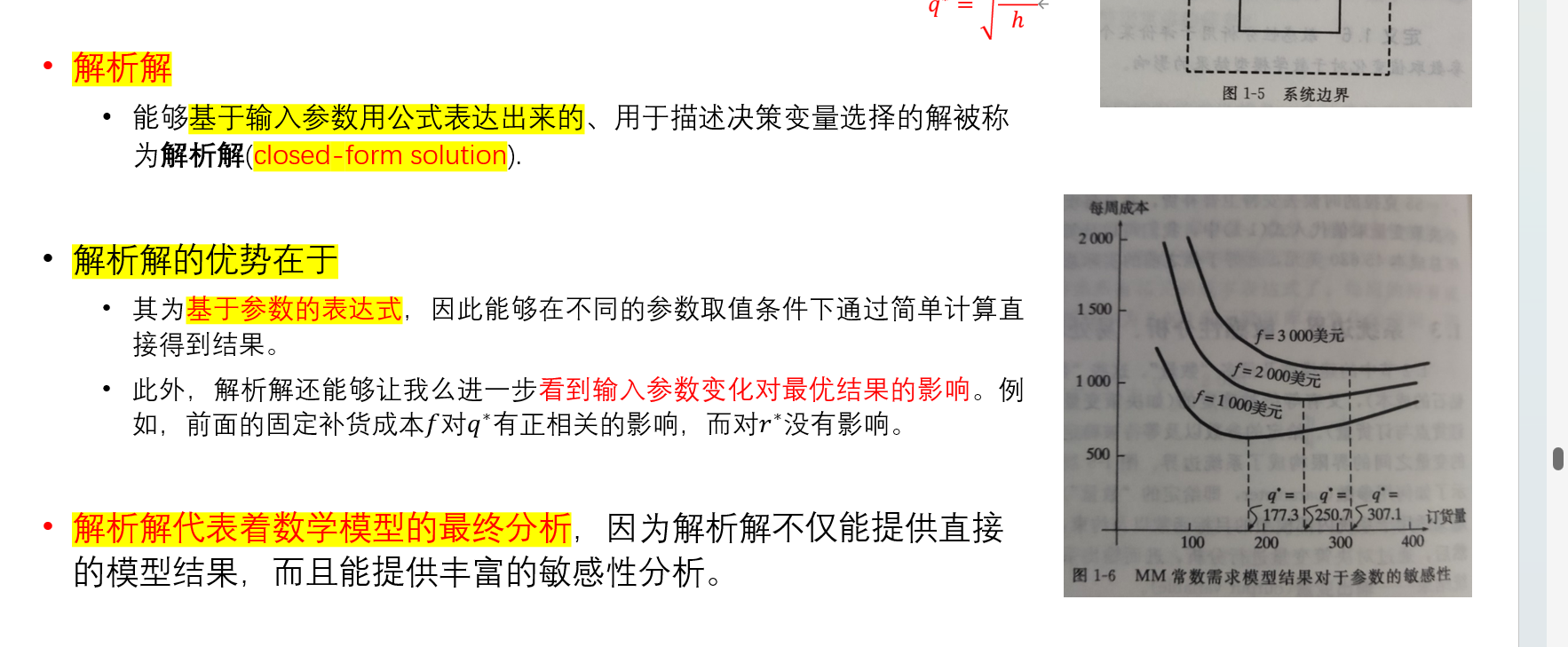
解析解是对输入参数的表示,原有输入参数中使用数值表示,是特定情况下的固定结果
即将原有的公式中的式子使用代数表示, 如图下所示:
5. dual method
pinal - > dual
reformation 一个心得问题,通过 relation 的方式实现
- 提供新的求解方案
- 提供另一个求解思路
5.1. legrengean relation
对不满足约束的情况增加惩罚 $p$, 得到
希望惩罚越来越小,所有 $()$ 内式子会趋近于 0
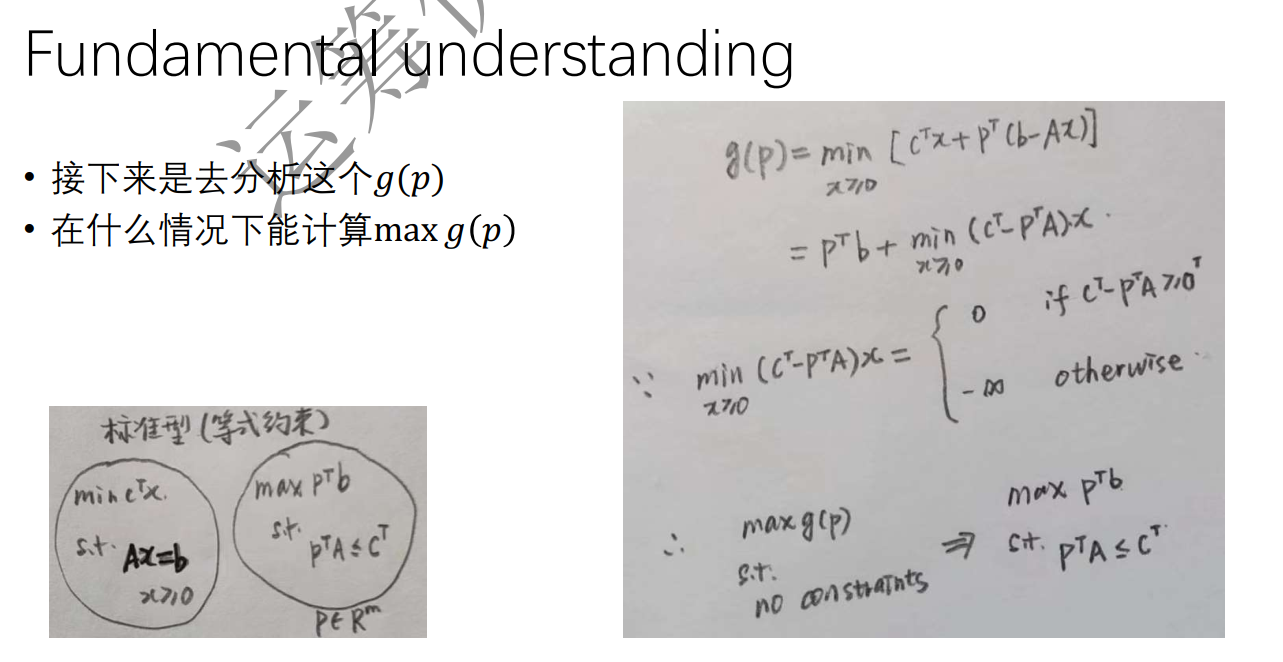
5.2. Pinal - > dual
$g(p) = c^Tx + p^t(b- Ax)$ 是松弛后的问题,每一 $g(P)$ 对应 原函数 $P$ 的下界,目标转换为对求解 $max \space g(p)$
然后通过推导,
因为 min 对 x 变量求最小值, 对 $P^T b$ 是常量,得到
因为 $x \geq 0$ ,所以,当 $c^T - p^TA \geq 0$ 时, min 可以取得最小值 0 , 函数值取值为 $p^T b$
最终问题转换为
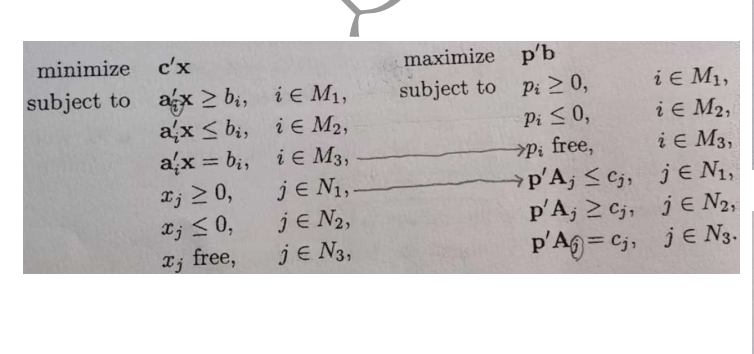
5.2.1. 剩余形式约束转换
5.3. dualtiy theory
- weak duality
- strong duality
- complementary slackness
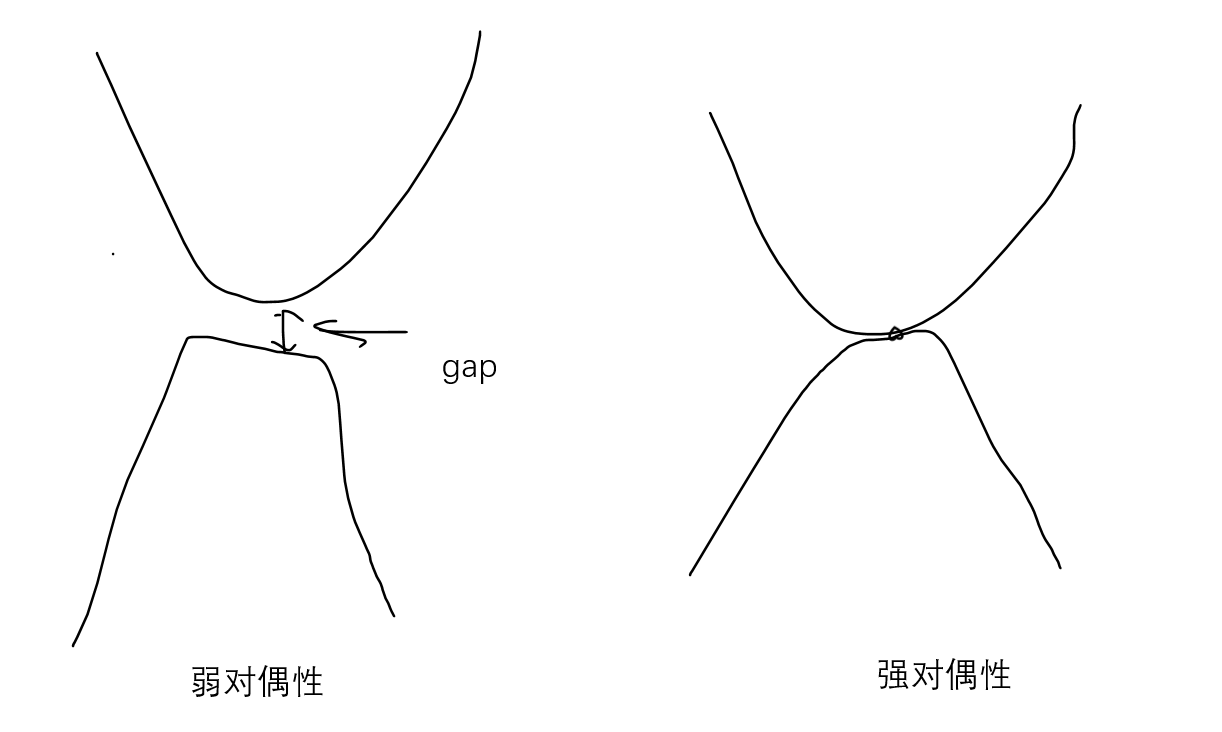
5.3.1. weak duality
5.3.2. strong duality
所以,得到 $w^T = c_B^TB^{-1}$
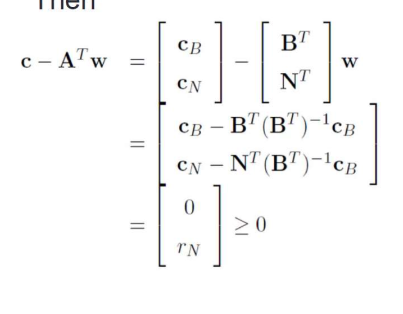
对偶问题可行 -》 原问题最优
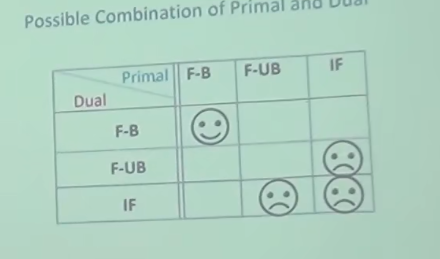
5.3.3. 对偶理论
P 问题 f-b(feasible - bounded) 与 对应 D 问题的 f-b
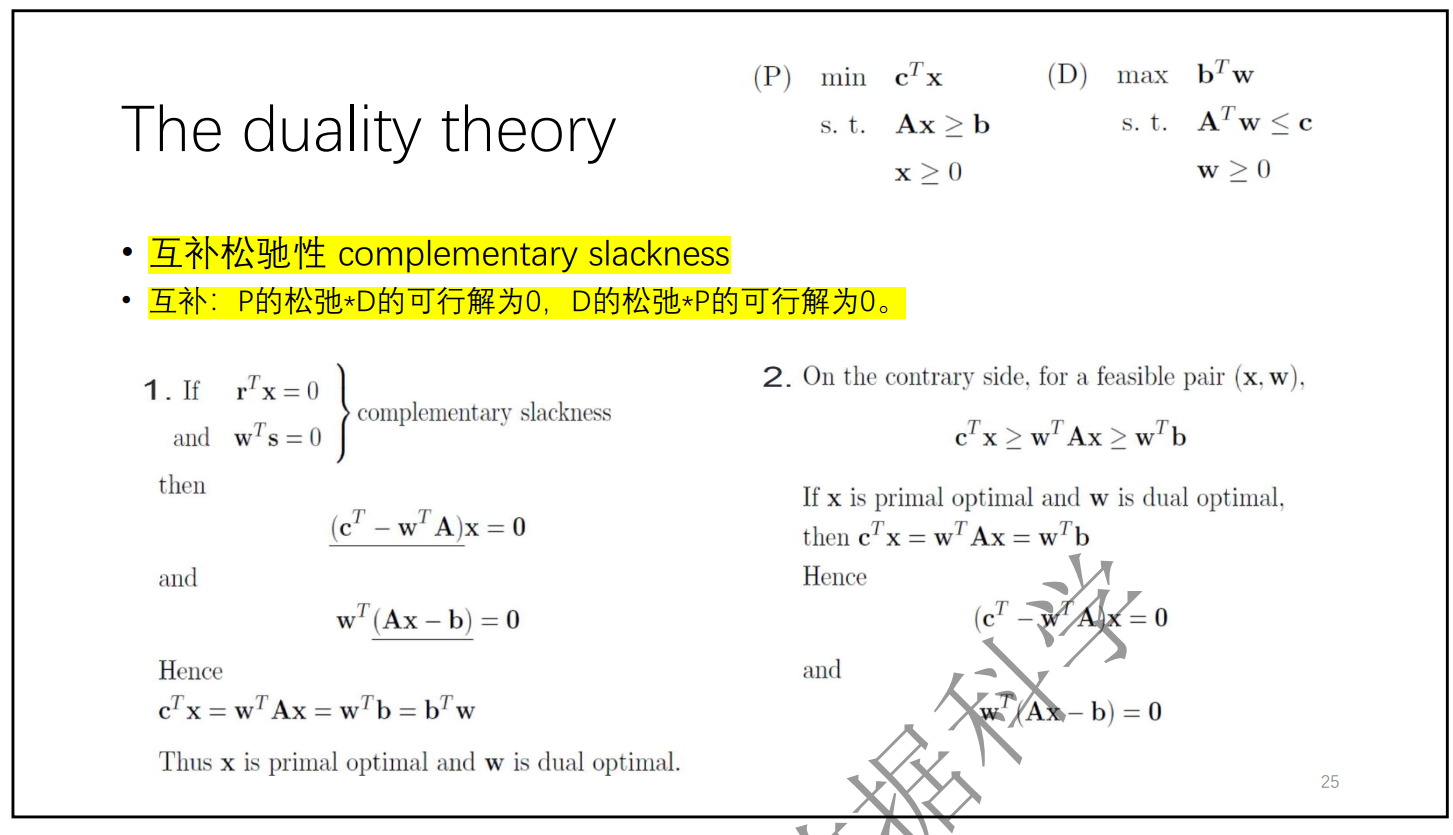
5.3.4. 互补松弛理论
互补定义:
- P 的松弛 * D 和可行解 = 0
- D 的松弛 * P 的可行解 = 0
互补松弛理论: 满足互补松弛理论时 = 》 x 时最优解, w 也是最优解
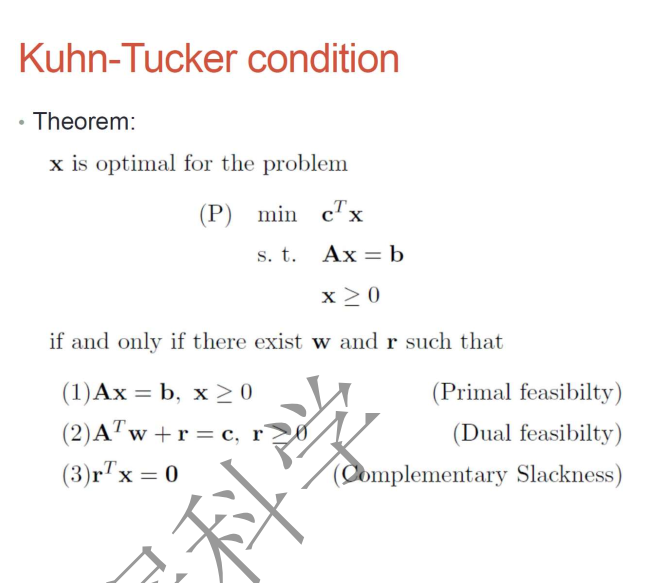
5.3.5. KKT 条件
对于线性问题, 满足互补松弛理论,即可获得问题的最优解
5.4. 经济学变量
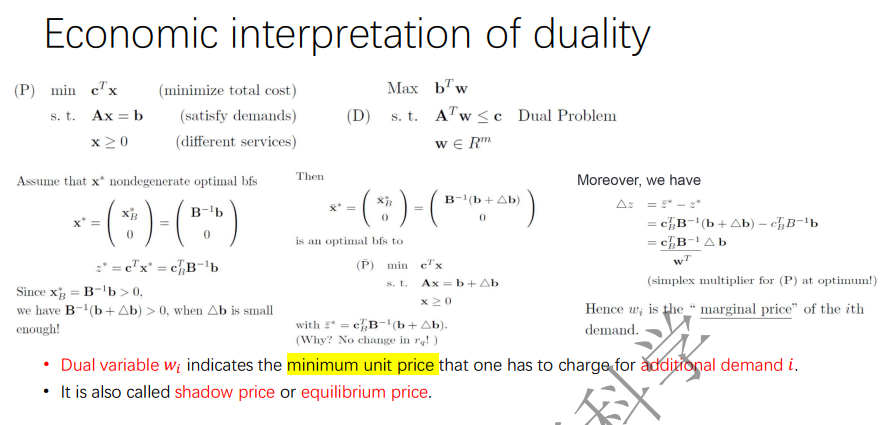
5.4.1. 互补松弛解释
见 PPT
6. Integer programming
6.1. 分配问题
好的,我将为你提取图片中展示的三种指派问题(Assignment Problem)的 LaTeX 表达式。
6.1.1. 指派问题 (0-1 Assignment Problem)
目标函数:
6.1.2. 二次指派问题 (Quadratic Assignment Problem)
目标函数:
分阶段分配:
- 从 $x_{ij}$ 表示部门 $i$ 分配到地点 $j$
- 从 $x_{kl}$ 表示部门 $k$ 分配到地点 $l$
$c_{i,j,k,l}$, 表示 $i ,j$ 在 $k, l$ 位置交互的 cost
$x_{ij} * x_{kl}$ 表示只有分配了这条链路, 才会产生 cost
6.1.3. 广义指派问题 (Generalized Assignment Problem)
目标函数:
6.2. IP solution
- LP 问题近似, 先视为连续问题,再求解
- 启发式算法,求解质量无保证
- 近似算法,求解质量具有保证
6.3. classic problem
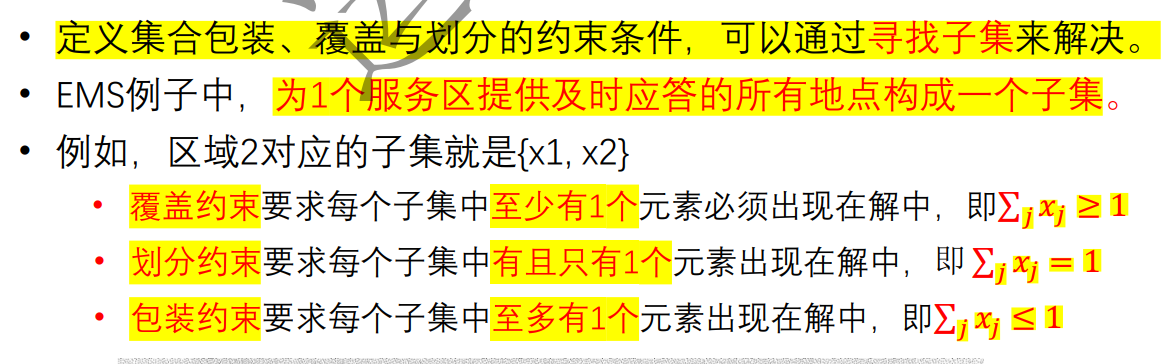
6.3.1. 几何覆盖问题
6.3.2. 设施选择问题
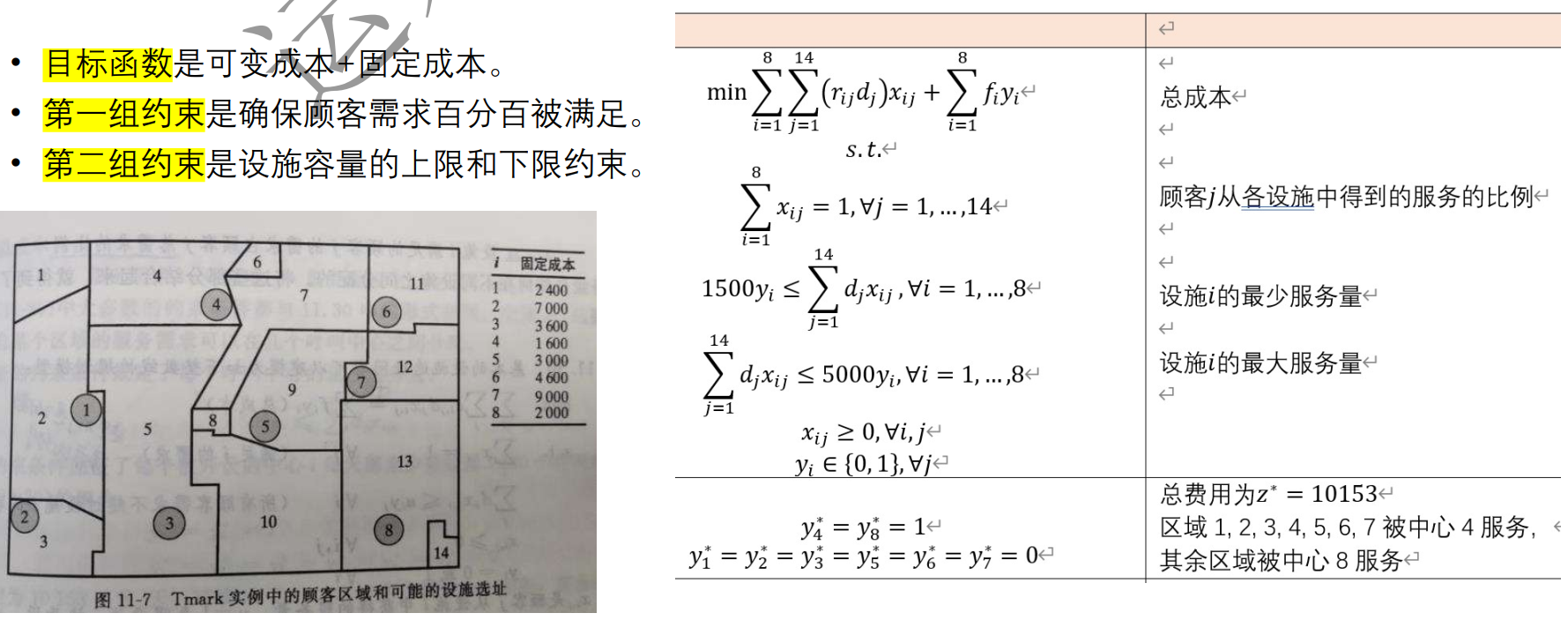
- 变量:有两类,
- 整数Y ,用于控制某个站点被建立,
- 实数X,表示建立的站点i 对 节点J 的服务比例
6.3.3. 网络问题
6.3.4. 车间调度问题
决策变量: $x_{j,k}$ 工作j 在设备K 上工作
约束:
$j, j’$ 约束 , j 必须在 $j’$之前
$j, j’$ 共同使用设备 $K $, 同一台机器不能同时服务同一个设备
$j’$ 的开始时间需要小于 $j$的结束时间,严格约束
当$y_{j,j’,k}$表示 作业 j 在 $j’$之前使用k ,值为1,表示可以使用
当$y_{j,j’,k}$ 为0 时, 约束生效,表示 $j’$必须在$j $之前完成
$y_{j,j’,k}$, 表示 j ,j’ 在k 上具有冲突
M 的约束作用, 当y 生效时,等式松弛,约束不起作用
当y = 0 时,约束严格作用
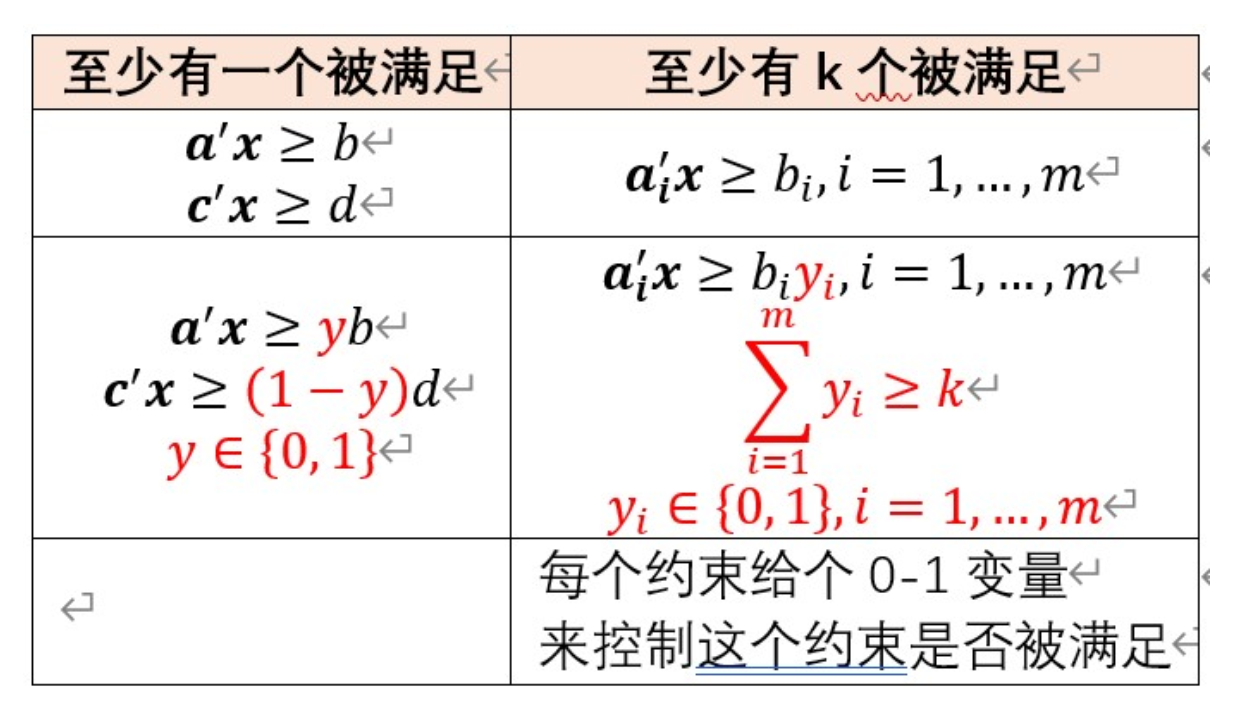
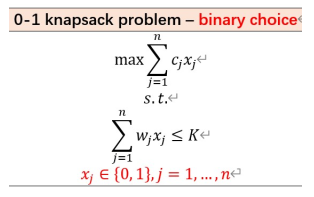
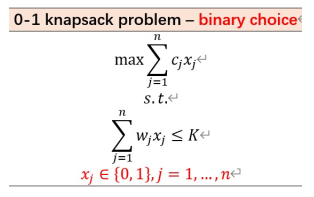
6.4. 0-1 modeling
0-1选择问题,是否选择
关联约束
组合中选择一个
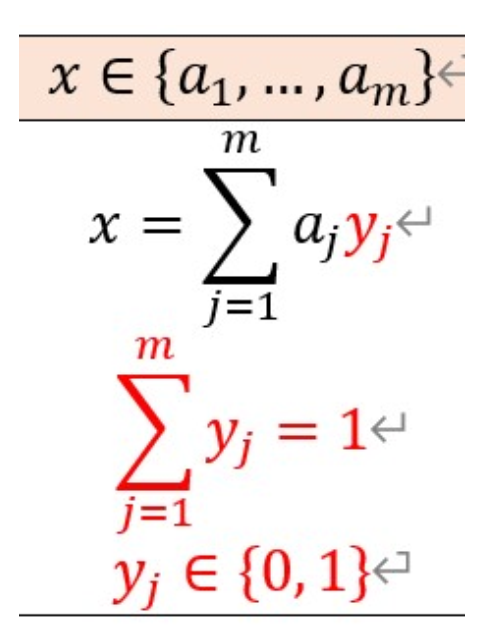
选择约束条件